3. Lineární diskrétní regulační obvod a jeho základní přenosy
Regulační pochod probíhá v regulačním obvodu. Regulační obvod se skládá z regulátoru a regulované soustavy (obr. 3. 1), kde  je přenos regulátoru,
je přenos regulátoru,  přenos regulované soustavy,
přenos regulované soustavy,  přenos měřicího členu a
přenos měřicího členu a  je přenos, přes který na regulační obvod působí poruchová veličina s obrazem
je přenos, přes který na regulační obvod působí poruchová veličina s obrazem  .
.
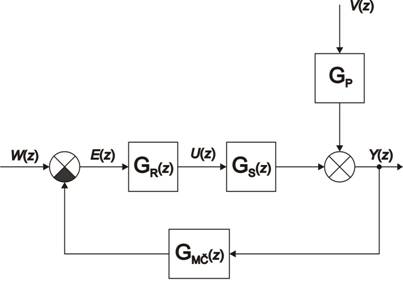
Výstupem regulačního obvodu je obraz regulované veličiny  , vstupními veličinami jsou obraz poruchové veličiny a obraz žádané veličiny
, vstupními veličinami jsou obraz poruchové veličiny a obraz žádané veličiny  . V samotném obvodu se vytváří regulační odchylka s obrazem
. V samotném obvodu se vytváří regulační odchylka s obrazem  , definovaná jako rozdíl mezi žádanou veličinou a regulovanou veličiny (3. 1).
, definovaná jako rozdíl mezi žádanou veličinou a regulovanou veličiny (3. 1).
Cíl regulace se dá vyjádřit dvěma ekvivalentními způsoby, prvním z nich je, aby regulátor snižoval velikost regulační odchylky e (3. 2) a druhým ekvivalentním cílem regulace je, aby se regulovaná veličina y přibližovala žádané veličině w (3. 3) bez ohledu na působení poruchové veličiny v.
 |
(3.1) |
 |
(3.2) |
 |
(3.3) |
Měřicí člen s přenosem musí měřit přesně a rychle, a proto ve většině případů lze předpokládat, že
 |
(3.4) |
Informaci o regulované veličině lze získat prostřednictvím měřicího členu, a proto je možné přiřadit ho k regulované soustavě.
Přenos dovoluje umístit působení poruchové veličiny do libovolného bodu regulačního obvodu. Nejčastěji však uvažujeme působení poruchové veličiny na vstupu regulované soustavy a nebo na jejím výstupu.
Z důvodu zjednodušení budeme nadále používat místo přesného označení obraz veličiny pouze označení veličina.
3.1 Základní přenosy diskrétního regulačního obvodu
Pakliže považujeme za vstupní veličinu regulačního obvodu žádanou veličinu a za výstupní veličinu regulačního obvodu považujeme regulovanou veličinu a uvažujeme-li poruchovou veličinu jako nulovou, tedy  , dostáváme přenos mezi žádanou veličinou a regulovanou veličinou, který označujeme jako přenos řízení
, dostáváme přenos mezi žádanou veličinou a regulovanou veličinou, který označujeme jako přenos řízení
 |
(3.5) |
Nyní uvažujeme jako vstupní veličinu regulačního obvodu poruchovou veličinu a výstupní veličinu regulovanou veličinu . Při úvaze, že žádaná veličina je rovna nule, tedy  , dostáváme přenos mezi poruchovou a regulovanou veličinou, který nazýváme přenos poruchy
, dostáváme přenos mezi poruchovou a regulovanou veličinou, který nazýváme přenos poruchy
 |
(3.6) |
Při vyšetřování vlastností regulačních obvodů je nutná znalost obou přenosů, přenosu řízení i poruchy. Alternativní možností popisu vlastností regulačních obvodů je znalost odchylkových přenosů.
Bereme-li vstupní veličinu regulačního obvodu žádanou veličinu a výstupní veličinu regulačního obvodu regulační odchylku , při poruchové veličině rovné nule, tedy , dostaneme přenos mezi žádanou veličinou a regulační odchylkou, kterou nazýváme odchylkový přenos řízení
 |
(3.7) |
Uvažujeme-li jako vstupní veličinu regulačního obvodu poruchovou veličinu a výstupní veličinu regulační odchylku , za předpokladu, že žádaná veličina je rovna nule, tedy , získáme přenos mezi poruchovou veličinou a regulační odchylkou, který nazýváme odchylkový přenos poruchy
 |
(3.8) |
Regulátor působí na soustavu tak, aby byly splněny cíle regulace (3. 2) a (3. 3). Pokud známe základní přenosy řízení, lze vypočítat regulovanou veličinu (3. 9) a regulační odchylku (3. 10)
 |
(3.9) |
 |
(3.10) |
Pro základní přenosy regulačního obvodu musí platit následující vztahy (3. 11).
 |
(3.11) |
Přenos otevřeného regulačního obvodu (3. 12) je definován jako součin všech členů ve smyčce.
 |
(3.12) |
Ve jmenovateli všech základní přenosů se nachází výraz, který rozhoduje o stabilitě regulačního obvodu, označujeme jej jako charakteristický mnohočlen (3. 13). Pokud tento mnohočlen položíme roven 0, získáme po úpravě charakteristickou rovnici (3. 14) [Švarc, 1992].
 |
(3.13) |
 |
(3.14) |