3.4. Metoda požadovaného modelu (inverze dynamiky)
Metoda umožňuje snadné a rychlé seřízení standardních typů číslicových a analogových regulátorů pro základní druhy regulovaných soustav s dopravním zpožděním. Typ regulátoru je doporučen z hlediska vlastností regulované soustavy a požadavku na nulovou trvalou regulační odchylku způsobenou skokovou změnou polohy žádané veličiny, resp. poruchy působící na výstupu regulované soustavy, viz obr. 23.

Obr. 23. Regulační obvod
regulátory
Předpokládá se použití standardních analogových a číslicových regulátorů s odpovídajícími L- a Z-přenosy v souladu s tab. 8.
Tab. 8. Přenosy standardních regulátorů
|
Typ |
Analogový regulátor |
Číslicový regulátor |
|
P |
|
|
|
I |
|
|
|
PI |
|
|
|
PD |
|
|
|
PID |
|
|

U číslicových regulátorů není uvažováno kvantování, integrace je realizována zpětnou (levou) obdélníkovou sumací a derivace zpětnou diferencí.
Regulované soustavy
Aby bylo možné metodu požadovaného modelu (inverze dynamiky)
použít, musí být přenos regulované soustavy
![]() v jednom ze
základních tvarů uvedených v tab. 10.
v jednom ze
základních tvarů uvedených v tab. 10.
Pro aperiodické regulované soustavy bude ukázáno získání náhradních přenosů v základních tvarech (27) a (28) z přechodové charakteristiky, případně transformací z tvaru (32).
Předpokládá se, že aperiodická regulovaná soustava může být aproximována jedním z náhradních přenosů
![]() (27)
(27)
resp.
![]() (28)
(28)
Dopravní zpoždění Td1, resp. Td2 u regulované soustavy může být přirozené nebo může vzniknout aproximací setrvačnosti vyššího řádu. Koeficient přenosu k1 je u proporcionálních regulovaných soustav dán ustáleným stavem na přechodové charakteristice, tj.
![]() .
(29a)
.
(29a)
Pokud vstupní skok není jednotkový, pak je dán poměrem změny výstupní veličiny y ke změně vstupní veličiny u v ustáleném stavu, tj.
![]() .
(29b)
.
(29b)
Hodnoty dalších parametrů T1 a Td1, resp. T2 a Td2 je možno snadno určit experimentálně z přechodové charakteristiky regulované soustavy hS(t) na základě vztahů (obr. 24) :
 ,
(30)
,
(30)
resp.
![]() .
(31)
.
(31)

Obr. 24. Přechodová charakteristika regulované soustavy
Pro identifikaci aperiodických regulovaných soustav vyššího řádu se často používá náhradní přenos
![]() .
(32)
.
(32)
Rychlé převedení přenosu (32) na požadované tvary (27) a (28) umožňuje tab. 9, kterou je možno rovněž využít pro převody v souladu se schématem (33)
![]()
![]()
![]() (33)
(33)
![]()
![]()
![]()
Pro získání přenosu v některém ze zbývajících tvarů je nutno použít vhodných identifikačních či aproximačních metod.
Tab. 9. Převedení přenosu regulované soustavy na požadované tvary
|
|
n |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
1 |
1,568 |
1,980 |
2,320 |
2,615 |
2,881 |
|
|
|
0 |
0,552 |
1,232 |
1,969 |
2,741 |
3,537 |
|
|
|
0,638 |
1 |
1,263 |
1,480 |
1,668 |
1,838 |
|
|
|
-0,352 |
0 |
0,535 |
1,153 |
1,821 |
2,523 |
Td1 0,352T1
Seřízení regulátorů
Na základě metody požadovaného modelu (inverze dynamiky) a následného simulačního upřesnění byly získány tab. 10 a 11, které umožňují jednoduché a rychlé určení hodnot stavitelných parametrů doporučovaných regulátorů (Vítečková, 1998).
Pro regulované soustavy bez dopravního zpoždění (Td = 0) se předpokládá požadovaný průběh přechodové charakteristiky hw(t) uzavřeného regulačního obvodu podle obr. 25a. Časová konstanta Tw musí být zvolena s ohledem na omezení akční veličiny a maximální nastavitelnou hodnotu zesílení regulátoru kPmax a u regulačního obvodu s číslicovým regulátorem musí navíc platit
![]() .
.
a) b)
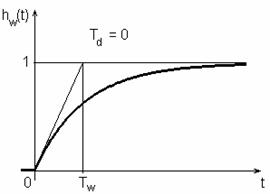

Obr. 25. Požadovaná přechodová charakteristika
uzavřeného regulačního obvodu:
a) bez dopravního zpoždění, b) s dopravním zpožděním
Pro regulované soustavy s dopravním zpožděním (Td 0) na základě požadovaného relativního překmitu (0 0,5) u přechodové charakteristiky hw(t) uzavřeného regulačního obvodu (viz obr. 25b), tab. 11 a vztahu
![]() (34)
(34)
se určí pro doporučený typ regulátoru z tab. 10 odpovídající hodnoty jeho stavitelných parametrů. Pokud dopravní zpoždění Td je velmi malé, hodnotu určeného koeficientu a je třeba vhodně snížit s ohledem na omezení akční veličiny a maximální nastavitelnou hodnotu zesílení regulátoru kPmax .
Tab. 10 a vztah (34) pro T 0 platí pro číslicové regulátory a pro T = 0 pro analogové regulátory.
Přesnost seřízení je okolo 5% u číslicových regulátorů a u analogových regulátorů je podstatně lepší. Požadovaný průběh je možno „doladit“ vhodnou úpravou zesílení regulátoru kP.
Při volbě vzorkovací periody T u číslicových regulátorů je třeba splnit podmínky (Isermanm, 1981; Vítečková, 1998)
![]()
![]()
kde t0,95 je doba, za kterou přechodová charakteristika regulované soustavy hS(t) dosáhne 95% své ustálené hodnoty, Td - dopravní zpoždění regulované soustavy, např. vyplývající z náhradního přenosu (27), resp. (28).
Vztahy pro určení hodnot stavitelných parametrů číslicových regulátorů v tab. 10 jsou pouze přibližné. Přesné vztahy jsou uvedené např. v (Vítečková, 1998).
Tab. 10. Doporučené typy regulátorů a výpočet jejich stavitelných parametrů
|
regulovaná soustava |
regulátor |
||||
|
TYP |
|
|
|
||
|
|
Td = 0 |
Td0 |
|
|
|
|
|
P |
|
|
- |
- |
|
|
PI |
|
|
|
- |
|
|
PD |
|
|
- |
|
|
|
PID |
|
|
|
|
|
|
PID |
|
|
|
|



Tab. 11. Hodnoty koeficientů a
| κ |
0 |
0,05 |
0,10 |
0,15 |
0,20 |
0,25 |
0,30 |
0,35 |
0,40 |
0,45 |
0,50 |
| a |
1,282 |
0,984 |
0,884 |
0,832 |
0,763 |
0,697 |
0,669 |
0,640 |
0,618 |
0,599 |
0,577 |
| β |
2,718 |
1,944 |
1,720 |
1,561 |
1,437 |
1,337 |
1,248 |
1,172 |
1,104 |
1,045 |
0,992 |
příklad použití
Pro regulovanou soustavu s dopravním zpožděním
![]()
je třeba navrhnout číslicový a analogový regulátor typu PI a PID. Regulátory je třeba seřídit tak, aby byl zajištěn relativní překmit přechodové charakteristiky regulačního obvodu = 0,05 (5%) pro T = 2.
Řešení:
Nejdříve se určí náhradní přenosy ve tvaru (27) a (28) v souladu se schématem (33) při použití tab. 9. Pak pro tyto náhradní přenosy pomocí tab. 10 a 11 se určí typ regulátoru a vypočítají se hodnoty jeho stavitelných parametrů.
Ze zadání přenosu regulované soustavy vyplývá: n = 3, k1 = 2, T3 = 4 a Td3 = 10.
a) PI regulátor
Pro přenos
![]() z tab. 9 se
dostane:
z tab. 9 se
dostane:
![]() ;
;
![]()
Číslicový PI regulátor
Pro překmit = 0,05 a k1 = 2, T1 = 7,92, Td = Td1 = 14,928, T = 2 z tab. 11 a 10 se dostane:
![]()
![]()
Analogový PI regulátor (T = 0)
![]()
![]()
b) PID regulátor
Pro přenos
 z tab. 9 se dostane:
z tab. 9 se dostane:
![]() ;
;
![]()
Číslicový PID regulátor
Pro překmit = 0,05 a k1 = 2, T1 = T2 = 5,052, Td = Td2 = 12,14, T = 2 z tab. 11 a 10 se dostane:
![]()
![]()
 ;
;

Analogový PID regulátor (T = 0)
![]()
![]()
Přechodové charakteristiky regulované soustavy a jejích náhradních přenosů jsou na obr. 26a. Na obr. 26b jsou přechodové charakteristiky uzavřeného regulačního obvodu. Všechny průběhy byly získány číslicovou simulací pomocí simulačního programu SIPRO (Farana, 1996).
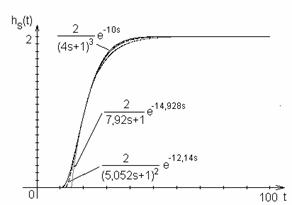

Obr. 26a.
Přechodové charakteristiky regulované Obr. 26b. Přechodové
charakteristiky
soustavy a její aproximace
uzavřeného regulačního obvodu
Uvedený přístup umožňuje jednoduché seřízení standardních
typů číslicových
a analogových regulátorů pro regulované soustavy s dopravním zpožděním. Pokud
dosažená kvalita regulace je nedostačující, je nutno použít nestandardní typ
regulátoru [např. Smithův, resp. modifikovaný Smithův regulátor (Isermann,
1981)], případně složitější strukturu regulačního obvodu (Åström,
K. – Hägglund, 1995; Isermann,
1981)